


Метаэвристические решения Задачи Коммивояжёра
В данной статье рассматриваем и реализуем на Python различные подходы (GA, ACO, SA) к решению задачи коммивояжёра.
12К открытий26К показов
В данной статье рассматриваем и реализуем на Python различные подходы (GA, ACO, SA) к решению задачи коммивояжёра.
О задаче
Задача коммивояжёра (Travelling Salesman Problem, TSP) — задача комбинаторной оптимизации. Как правило, её суть сводится к поиску оптимального пути, проходящего через все промежуточные пункты по одному разу и возвращающегося в исходную точку.
Для возможности применения математического аппарата к решению задачи мы представим её в виде симметричного графа. Вершины графа соответствуют условным городам, а рёбра — путям сообщения между этими городами. Каждому ребру сопоставим критерий выгодности маршрута — расстояние между городами. В целях упрощения задачи будем считать, что граф является полностью связным.
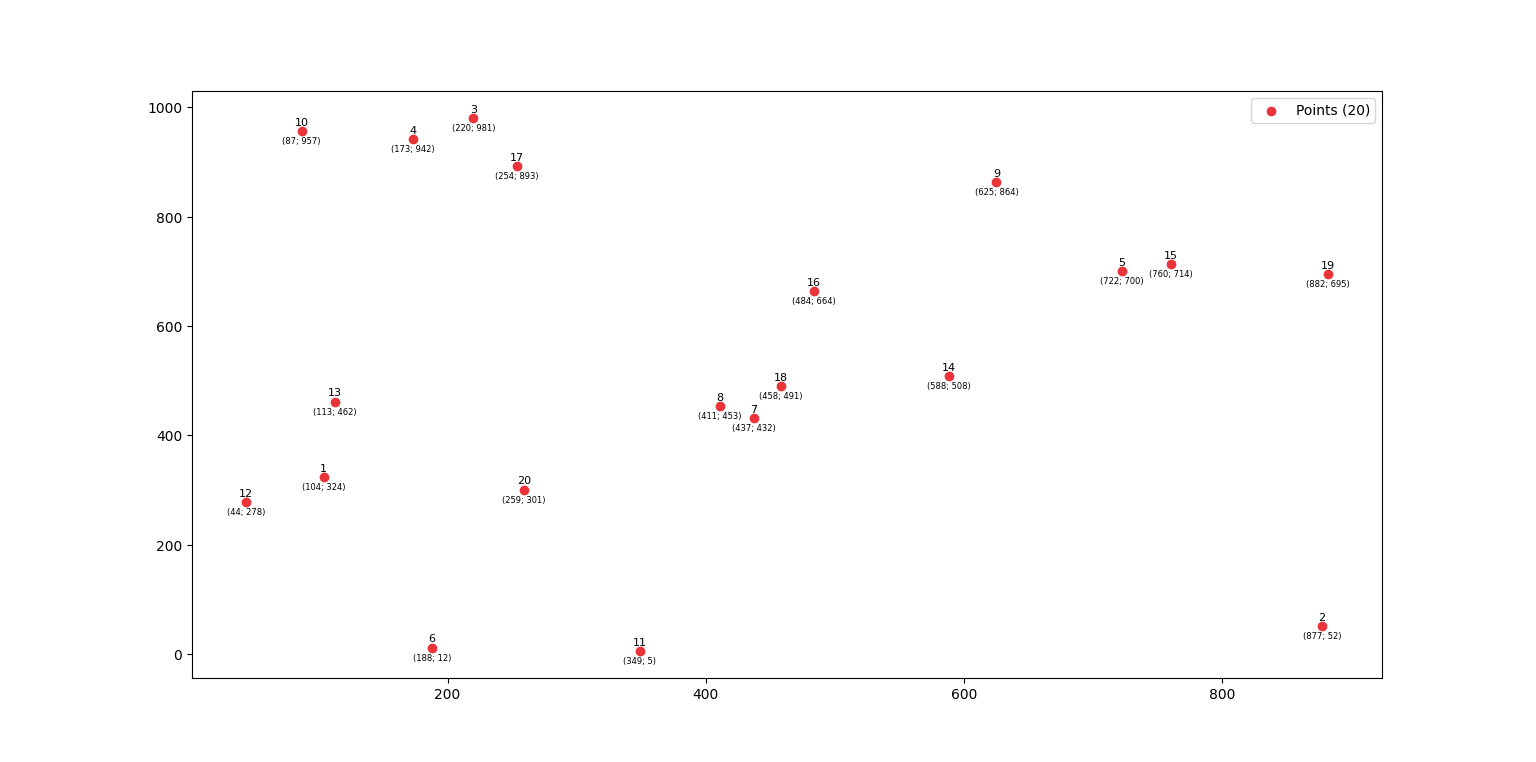
Для визуализации задачи будем использовать класс TSP (программный код представлен ниже). Этот класс включает в себя функции, необходимые для отрисовки точек, маршрутов, а также интерактивной легенды, на элементы которой можно нажимать для того, чтобы скрыть / отобразить выбранные пути. Сгенерируем набор точек, воспользовавшись функцией points = generate_problem(20), и выведем его на экран с помощью TSP(points=points, paths=None).
Файл TSP.py
Стоит отметить, что в программной реализации решениями является список объектов класса Path, которые содержат в себе информацию о последовательности точек маршрута, о его длине и названии (используются для легенды на графике).
Файл Path.py
Но откуда берутся эти решения?
Поскольку коммивояжёр в каждом из условных городов встаёт перед выбором следующего города из тех, что он ещё не посетил, существует (n-1)! / 2 маршрутов для симметричной задачи. Если городов, например, 20, то возможных маршрутов будет 60 822 550 204 416 000. Для того, чтобы перебрать такое количество вариантов и найти оптимальный путь, понадобятся огромные вычислительные мощности и куча времени.
К счастью, на практике зачастую не требуется находить именно точное решение. Достаточно и субоптимального, которое будет близко к оптимальному пути.
При такой постановке задачи для её решения можно воспользоваться метаэвристическими алгоритмами, которые значительно ускорят процесс нахождения решения.
Метаэвристические алгоритмы
Метаэвриистика — метод оптимизации, многократно использующий простые правила для достижения субоптимального решения.
В данной статье мы рассмотрим следующие алгоритмы решения задачи:
- Генетический алгоритм (Genetic Algorithm, GA), относящийся к классу эволюционных методов;
- Муравьиный алгоритм (Ant Colony Optimization, ACO), относящийся к классу методов “роевого” интеллекта;
- Алгоритм имитации отжига (Simulated annealing, SA), относящийся к классу методов, имитирующих физические процессы.
Каждый из вышеописанных алгоритмов будет использовать методы для вычислений расстояний между точками. Объединим данный функционал в класс Base, от которого в дальнейшем будем наследовать общие методы.
Файл Base.py
Здесь:
euclidean_dist()используется для нахождения Евклидова расстояния между двумя 2D точками;calculate_dist()рассчитывает длину указанного пути на основе матрицы расстояний;distance_matrix(), собственно, эту матрицу вычисляет.
Генетический алгоритм
Генетический алгоритм — алгоритм поиска, используемый для решения задач оптимизации и моделирования путём случайного подбора, комбинирования и вариации искомых параметров с использованием механизмов, аналогичных естественному отбору в природе.
Данные механизмы применяются к особям, каждая из которых в программной реализации представляет из себя список индексов 2D точек — последовательность, в которой эти точки следует обойти для достижения кратчайшего пути. Начальная популяция состоит из особей, случайно сгенерированных функцией initialization().
После создания начальной популяции запускается цикл операций, направленных на постепенную эволюцию особей:
fitness_sort()ранжирует особи в текущей популяции с помощью функции приспособления (чем короче маршрут, содержащийся в геноме особи, тем лучше);selection()отбирает часть наиболее приспособленных особей из текущей популяции;crossover()скрещивает особей текущей популяции, соединяя части генома от двух случайно выбранных родителей (панмиксия);mutation()случайным образом делает перестановки в геноме некоторых особей текущей популяции.
Когда цикл завершит свою работу, мы используем лучшую особь (маршрут) из последней популяции в качестве решения задачи.
Отметим, что результаты работы алгоритма во многом зависят от заданных гиперпараметров:
population— общее число особей, участвующих в одной итерации;iter— максимальное количество итераций алгоритма;s— определяет, сколько лучших особей попадет в следующую популяцию (в процентном соотношении);m— определяет, как часто особи в популяции мутируют (в процентном соотношении).
Ниже приводится программная реализация данного алгоритма.
Файл GA.py
Такой результат получается при запуске алгоритма с набором гиперпараметров GA(population=1500, iter=40, s=0.2, m=0.5):

Муравьиный алгоритм
Муравьиный алгоритм — один из эффективных алгоритмов для нахождения приближённых решений задачи коммивояжёра, а также решения аналогичных задач поиска маршрутов на графах. Суть подхода заключается в анализе и использовании модели поведения муравьёв, ищущих пути от колонии к источнику питания.
Изначально условные муравьи передвигаются случайным образом, охватывая различные маршруты. Во время передвижения муравьи оставляют след из феромона, обозначая эти самые маршруты. Соответственно, чем короче получился путь, тем большее количество феромона за одинаковое количество времени муравьи на нём оставят. Феромон с течением времени испаряется. Из-за этого на длинных маршрутах остаётся меньше феромона, чем на коротких, даже если по ним передвигалось одинаковое количество муравьёв. Муравьи будут чаще выбирать самую “пахучую тропинку” и забывать пути с меньшим количеством феромона.
В программной реализации мы на каждой итерации цикла имитируем поведение каждого муравья из колонии:
create_indx()формирует маршрут муравья (список индексов точек) и подсчитывает длину;select_i()отвечает за выбор муравьём каждой последующей точки маршрута внутри функцииcreate_indx();update_pm()обновляет матрицу феромона.
Формулой ниже описывается вероятность, с которой муравей перейдёт из точки i в точку j (используется в функции create_indx()):
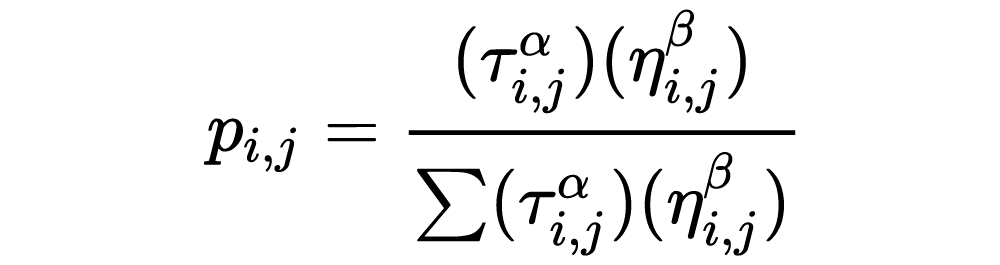
Здесь:
τ(i,j)— количество феромона на ребреi,j(значение из матрицы феромона);α— гиперпараметр, контролирующий влияниеτ(i,j)(задаётся пользователем);η(i,j)— привлекательность ребраi,j, равняется1 / d(i,j)(обратному значению из матрицы расстояний);β— гиперпараметр, контролирующий влияниеη(i,j)(задаётся пользователем).
После формирования маршрутов необходимо обновить матрицу феромона (за это отвечает функция update_pm()). Обновление происходит по следующему правилу:

Здесь:
τ(i,j)— количество феромона на ребреi,j(значение из матрицы феромона);ρ— скорость испарения феромона (задаётся пользователем);Δτ(i,j)— количество отложенного феромона, равняетсяq / d(i,j)(интенсивность феромона, делённая на длину маршрута из точкиiв точкуj).
В конце каждой итерации находим лучший маршрут из маршрутов, пройденных на текущей итерации, и сравниваем его с абсолютно лучшим найденным маршрутом. Если новое решение оказалось лучше, то записываем его в отдельную переменную. Последний записанный маршрут и будет являться решением задачи.
Так же, как и генетический алгоритм, данный алгоритм зависим от гиперпараметров:
ants— общее количество агентов (муравьев), задействованных в одной итерации;iter— максимальное количество итераций алгоритма;α— коэффициент, контролирующий влияние феромона на ребре;β—коэффициент, контролирующий влияние привлекательности маршрута (величина, обратно пропорциональная длине маршрута);ρ— коэффициент испарения феромона, который отражает степень взаимного влияния между муравьями, как правило, значение равно [0, 1], что предотвращает бесконечное накопление феромона;q— интенсивность феромона, которая представляет собой общее количество феромонов, в определённой степени влияет на скорость сходимости алгоритма.
Ниже приводится программная реализация данного алгоритма.
Файл ACO.py
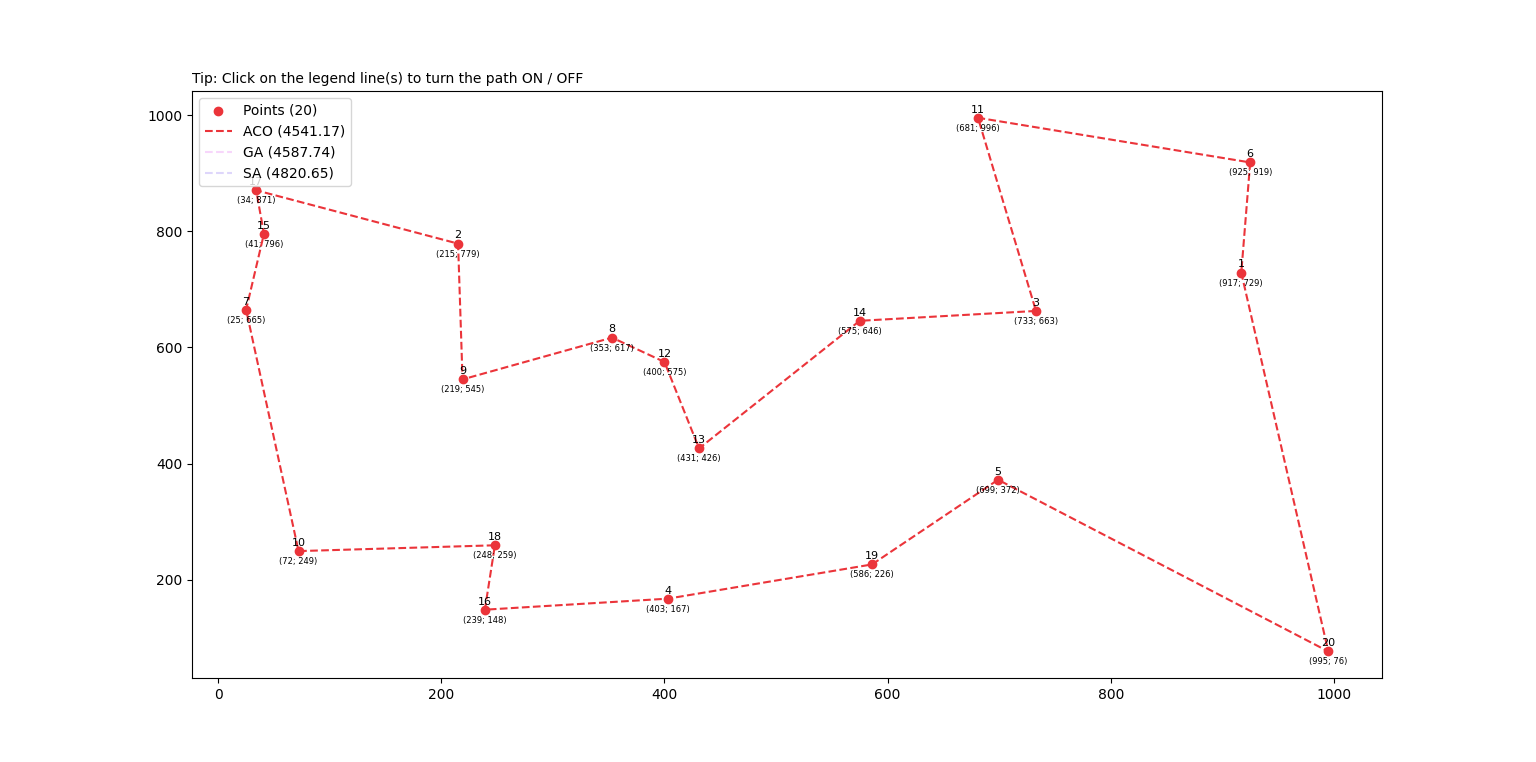
Такой результат получается при запуске алгоритма с набором гиперпараметров ACO(ants=100, iter=20, a=1.5, b=1.2, p=0.6, q=10):
Алгоритм имитации отжига
Алгоритм имитации отжига — метод решения задачи глобальной оптимизации. Он основывается на имитации физического процесса, который происходит при кристаллизации вещества, в том числе при отжиге металлов. Предполагается, что в определённый момент атомы вещества практически выстроены в кристаллическую решётку, но ещё допустимы переходы отдельных атомов из одной ячейки в другую. Активность атомов тем больше, чем выше температура, которую постепенно понижают, что приводит к тому, что вероятность переходов в состояния с большей энергией уменьшается. Устойчивая кристаллическая решётка соответствует минимуму энергии атомов, поэтому атом либо переходит в состояние с меньшим уровнем энергии, либо остаётся на месте.
В программной реализации под энергией понимается длина получившегося маршрута. Изначально маршрут задаётся случайно. На каждой итерации с помощью перестановки пары индексов мы генерируем новый маршрут. На основе его длины, длины предыдущего маршрута и текущего значения температуры функция is_acceptable() определяет, совершать ли переход в новое состояние или нет. Вероятность перехода рассчитывается по формуле:

Здесь:
ΔF(i)— изменение “энергии” (разность между длинами вероятного и текущего маршрута);T(i)— значение температуры наi-ой итерации алгоритма.
В конце каждой итерации система “остывает”: параметр, отвечающий за температуру, уменьшается. Когда алгоритм отработает отведённое количество итераций, он вернёт минимальный найденный маршрут, являющийся решением задачи.
Гиперпараметры алгоритма:
iter— максимальное количество итераций алгоритма;t— начальная температура поиска, уменьшается по мере продвижения поиска;g— коэффициент, влияющий на изменение температуры.
Ниже приводится программная реализация данного алгоритма.
Файл SA.py
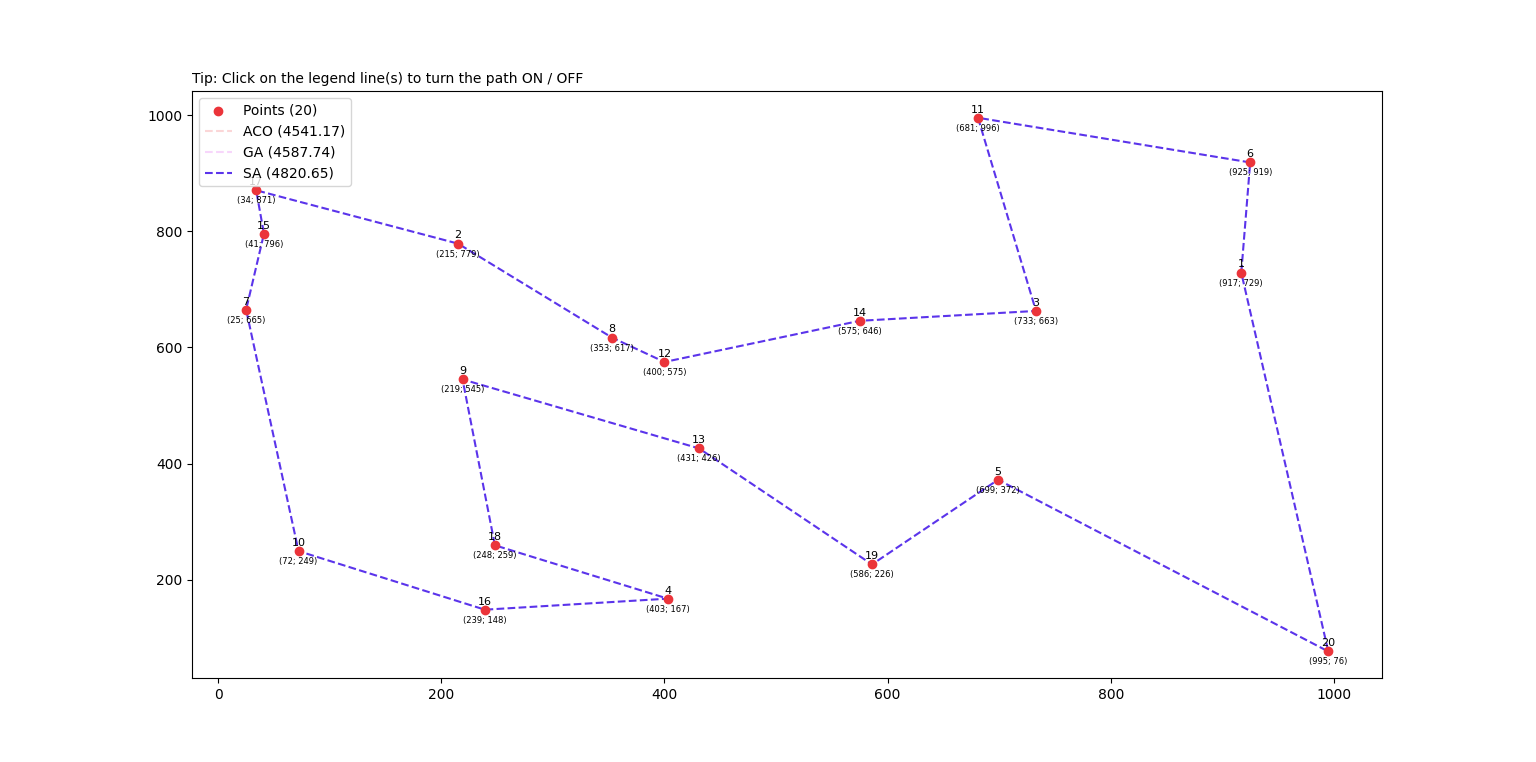
Такой результат получается при запуске алгоритма с набором гиперпараметров SA(iter=20000, t=100, g=0.6):
Сравнение алгоритмов
Сравнивать алгоритмы затруднительно, потому что — как упоминалось выше — результаты во многом зависят от подобранных гиперпараметров. Так же нужно учитывать, что существует довольно много различных вариаций реализации алгоритмов, в зависимости от которых результаты тоже будут отличаться.
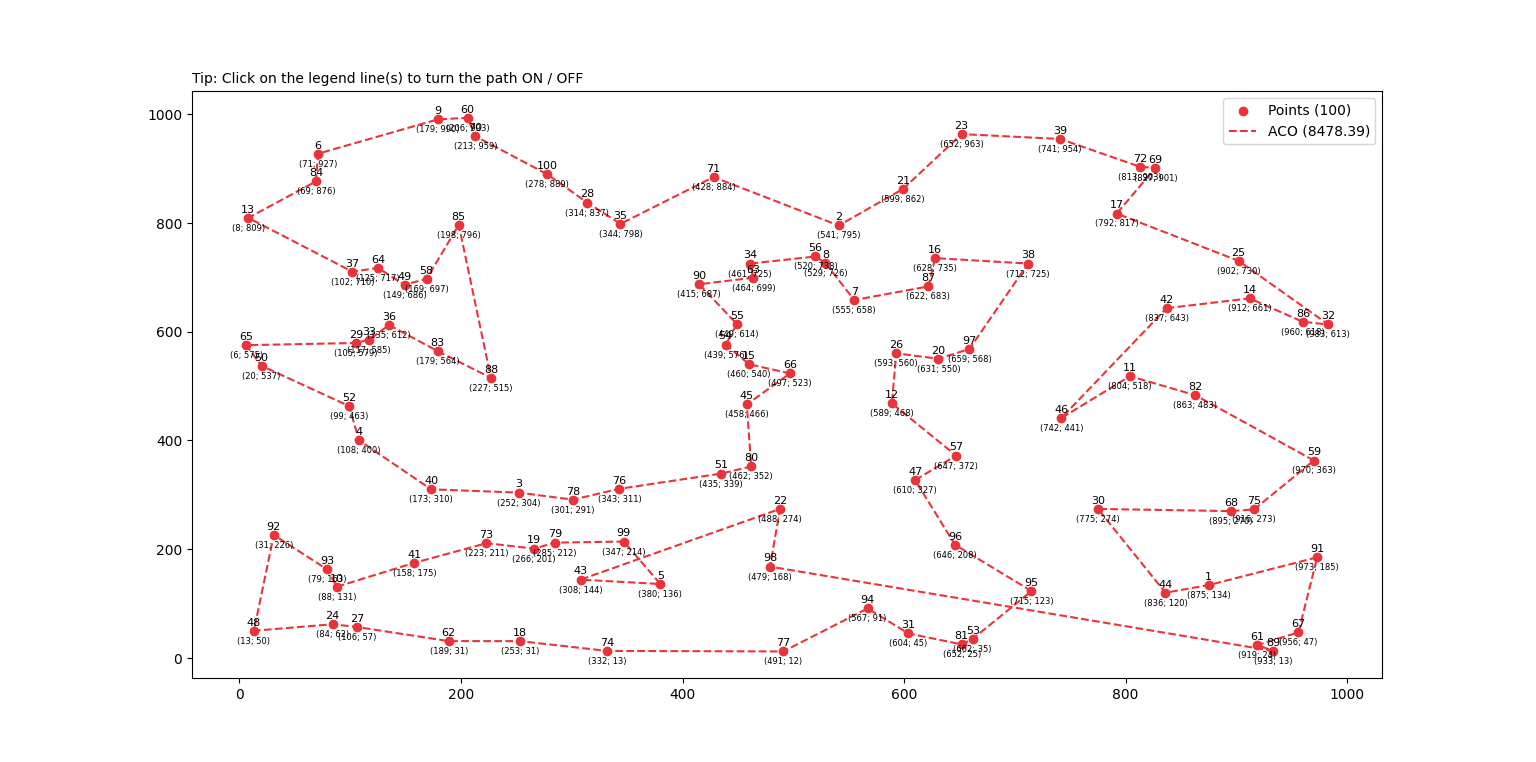
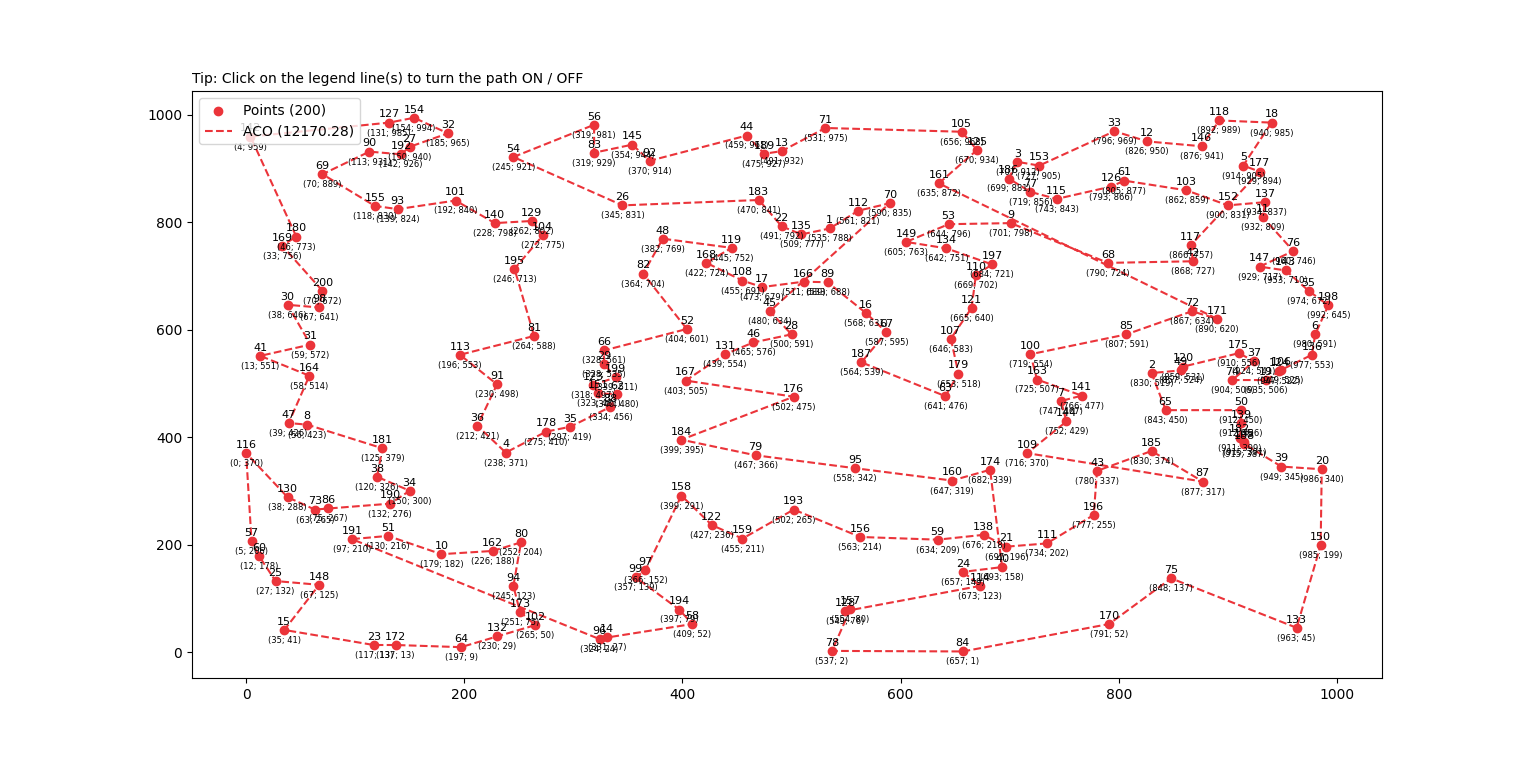
Если же выбирать лучшую реализацию из тех трёх, что были описаны в данной статье, то я бы отдал предпочтение муравьиному алгоритму. Он довольно быстр и, что наиболее важно, показывает хорошие результаты даже при большом количестве исходных данных. Ниже приводятся примеры решения задачи на 100 и 200 точек.
Заключение
Таким образом, мы разобрали одни из самых популярных метаэвристических подходов к решению задачи коммивояжёра: генетический алгоритм, муравьиный алгоритм и алгоритм иммитации отжига.
Подробнее ознакомиться с кодом данных алгоритмов и поэкспериментировать с подбором гиперпараметров можно на GitHub’е по данной ссылке.

12К открытий26К показов

Вместе с Никитой Егоровым, ведущим аналитиком в МТС Диджитал, объясняем принципы партиционирования простыми аналогиями, сравниваем с шардированием, разбираем стратегии разбиения данных и популярные инструменты (PostgreSQL, BigQuery, ClickHouse).
Как отладить код. Показываем основные варианты отладки кода для начинающих. Рассматриваем пошаговую инструкцию ✔ Tproger

Нужен ли сеньору второй язык программирования? Опыт и выводы разработчика с 18 годами стажа — когда и зачем изучать новые языки
Что такое HTTP-запросы. Показываем основные виды запросов HTTP. Рассматриваем пошаговую инструкцию по использованию ✔ Tproger