


Intel и Mobileye предложили формулу для проверки безопасности беспилотных автомобилей
Новости
Формула гарантирует, что беспилотное авто действует ответственным образом и не будет причиной несчастных случаев, за которые можно обвинить производителя.
873 открытий877 показов
На прошедешем в Сеуле форуме World Knowledge профессор Амнон Шашуа, вице-президент Intel и главный исполнительный директор Mobileye, предложил индустрии беспилотных автомобилей способ доказания безопасности автономных транспортных средств.
Предложенное решение
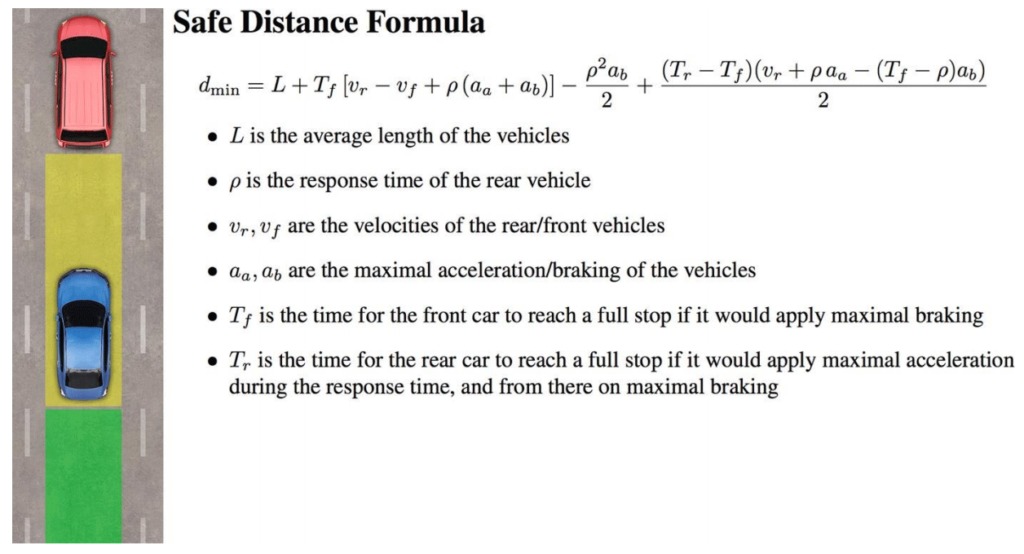
Его решение, опубликованное в научной статье и тезисно в сводном документе, представляет собой математическую формулу. При использовании формулы в производстве гарантируется, что беспилотное авто действует ответственным образом и не будет причиной несчастных случаев, за которые производителя можно обвинить.
Основа формулы
Данная формула базируется на двух фундаментальных принципах:
- Доказуемые гарантии безопасности;
- Экономическая масштабируемость.
Первый принцип — это минимальный набор требований, которым должен соответствовать каждый беспилотный автомобиль, и описание способов, как им соответствовать. Второй — это обычное требование, гарантирующее, что разработанные инженерные решения действительно способны масштабироваться на миллионы автомобилей, а не являются всего лишь предметом научных исследований.
Модель Responsibility Sensitive Safety
Предложенная компанией Mobileye модель получила название Responsibility Sensitive Safety (RSS). Она обеспечивает конкретные и измеримые параметры человеческого понимаая ответственности и осторожности. В модели определены понятия «Safe State» (безопасное состояние) и «Cautious Commands» (осторожные команды), определяющие, что автономное транспортное средство не может быть причиной аварии, независимо от того, какие действия предпринимаются другими транспортными средствами.
Согласно предложенной модели, каждое действие автопилота проверяется в реальном времени на соответствие простым математическим формулам. Учёные отказались от традиционного подхода обучения нейронных сетей всем возможным дорожным происшествиям, так как для этого требуется огромное количество данных. Что, возможно, сработает в симуляции, то не будет действенно в реальных дорожных условиях из-за непредсказуемости человеческого поведения.
Новые стандарты
Шашуа также призвал индустрию и разработчиков к совместной переработке существующих стандартов для определения ответственности при неизбежных авариях с участием беспилотных и управляемых транспортных средств. Он пояснил, что все нынешние правила и положения сформулированы вокруг водителя-человека, управляющего автомобилем, и что новые параметры необходимы для учёта автономных транспортных средств:
Необходимость определения ответственности в случае аварии — ключ от всех проблем. Так же, как и лучшие водители в мире, беспилотники не смогут избежать несчастных случаев из-за событий, находящихся вне их контроля. Но даже самый ответственный и осторожный водитель вряд ли будет причиной несчастного случая, тем более, если он обладает 360-градусным зрением и молниеносной реакцией, как у автономных средств.
Модель RSS формализует правила таким образом, что автомобиль является безопасным для использования в рамках, определённых как безопасные. Они будут устанавливаться с чётким определением погрешности, которая должно быть согласована со всеми участниками рынка и регулирующими органами.
Такая модель RSS, по мнению компании, увеличит доверие общества к беспилотным машинам. Все будут знать, что есть непреложные правила, которым подчиняется любая машина с автопилотом. Поэтому все расследования ДТП будут быстры и точны, а ответственность можно будет установить, основываясь на фактах.

873 открытий877 показов
О методах использования GenAI в бизнес-сегменте: плюсы и минусы новых технологий. С чем приходится сталкиваться, какие задачи выполнять и на что рассчитывать?

Газпромбанк.Тех совместно с Научно-технологическим университетом «Сириус» объявляет о старте отбора на образовательный интенсив для будущих специалистов в области анализа данных и машинного обучения. Участие в программе полностью бесплатное.
Как технологии компьютерного зрения и нейросети меняют подход к UI-тестированию? Рассказываем, почему Vision-Language модели вытесняют классические автотесты, и как они помогают автоматизировать тестирование на естественном языке.
AI Darwin Awards 2025: Taco Bell с 76 тако, Deloitte с фейковыми цитатами, Replit с удалённой БД — худшие провалы ИИ года